

 联系我们
联系我们

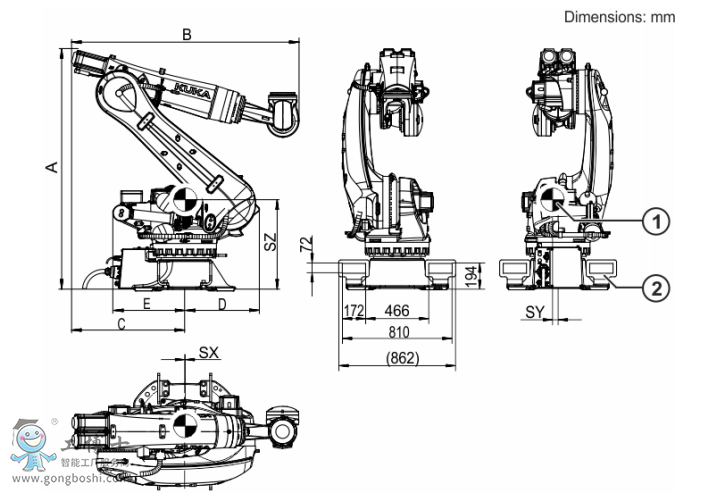
KUKA机器人按钮按键的编程你懂吗?

声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
STEP 1 定义按键
使用系统预先构建的结构体 KRLMSGDLGSK_T
一个对话框中*多可以有7个按钮按键,在声明结构体变量时一定是7个元素的数组。
decl krlmsgdlgsk_t softkey[7]
softkey[1]={sk_type #value, sk_txt[] “Four”}
softkey[1]表示**个KUKA配件按钮按键,#value表示这个按键使用了,“Four”表示按键上要显示的内容。
softkey[5]={sk_type #empty}
softkey[5]表示第五个按钮按键,#empty表示这个按键未使用。
这7个按键,程序员可以决定使用哪个按键,不讲究顺序。
STEP 2 生成对话框
使用系统自带的函数 set_krldlg 生成信息。
函数有返回值,返回值是信息在缓存中的地址,类型是int。
int address
address=set_krldlg(mess,para[],softkey[],option)
生成对(KUKA配件)话框的函数 set_krldlg 不需要指定信息的类型,因为对话框只有一种类型,另外需要将按钮按键的数组作为参数传递进去。
STEP 3 生成对话框的后续处理
对话框生成后一定是停着等用户去进行选择的,所以让程序进入到一个循环中。循环一直在查询对话框是否还在缓存中,如果没有人去选择,则对话框一直不消失,能查询得到;如果被选择了,那么对话框消失,查询不到了。同时用户按了哪个按键,通过查询函数 exists_krldlg 的第二个参数进行反馈(在样例代码中为 answer )。
以下为样例代码:
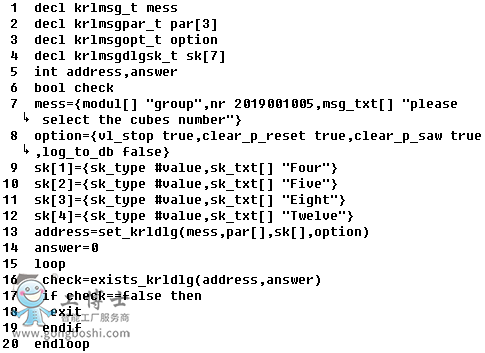
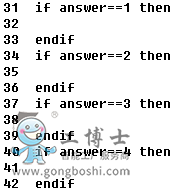
在获得了 answer 值之后,就可以利用程序判断,按了哪个按键,该去做什么事情。
了解更多机器人资讯点击:KUKA配件
